前言:最简单的距离,为什么最耐用?#
在我们学习社会序列分析时,可能会以为“欧几里得距离”只是最基础的知识,没什么特别。但不知读者有没有想过,一个公元前 300 年的几何公式,为什么还能出现在我们分析当代社会轨迹的模型中?
这不是偶然,而是因为:
- 它的直觉性很强:“两点之间的最短距离是直线”,人人都懂;
- 它的数学性很好:满足勾股定理、三角不等式、连续可导等性质;
- 它的适应性很广:二维地图、三维建模、高维状态空间,一套公式走天下;
- 它的算法性也很稳:被无数模型默认使用(如 K-means、PCA、KNN、神经网络等)
甚至可以说,欧几里得距离是“所有现代距离度量的祖师爷”。
而在社会科学中,当我们把一个人的一生、一个家庭的变迁、一个群体的轨迹,转化为向量化的状态数据后,我们仍然绕不开这个最基础、却最强大的度量方式。
本篇教程将带你重新认识这位“老朋友”:
- 它的起源:从欧几里得几何到现代坐标空间
- 它的数学本质:范数、向量、空间结构(对学习机器学习和深度学习都非常非常重要)
- 它的可视化解释:从三角形斜边到高维空间距离
下一篇教程中,我们会重点讲解:
- 它的社会科学应用:为什么它在社会序列分析中依然很重要,并且以 TraMineR 包为例给大家讲解;
- 它的局限与转向:什么时候我们应该选择它,又什么时候该超越它?
在机器学习、图像识别、基因比对之外,欧几里得距离在社会科学中的生命力,远比我们想象得更深远。
现在,就让我们从一张纸上的两个点开始,重新出发。
目录#
一、欧几里得距离的源起:最古老的度量方式之一#
欧几里得距离(Euclidean Distance)得名于古希腊数学家 Euclid(欧几里得),他在公元前 300 年左右,编写了一部划时代的数学著作《几何原本》(英文名 Elements)。这本书一共包含13卷,被称为人类历史上最成功、影响最深远的教科书之一。它系统地整理了古希腊数学知识,提出了“公理-定理”的证明体系,对后来的科学、数学、甚至哲学都产生了巨大影响。
其中,欧几里得距离最早就是在这本书的平面几何部分中,用来衡量两个点之间的“直线距离”。
什么是“几何”?什么是“平面几何”?#
“几何”这个词来自希腊文 geo(大地) + metron(测量),意思就是“测量大地”。
最初,几何学是为了帮助人们:
- 测量土地(古埃及尼罗河泛滥后重新划分地块);
- 计算面积、角度;
- 修建房屋、绘制地图;
也就是说,几何学是研究“形状、空间、位置、大小和相互关系”的学科。
几何主要回答以下问题:
| 几何问题 | 举例 |
|---|---|
| 距离是多少? | 两点之间的最短距离(如欧几里得距离) |
| 面积是多少? | 一个三角形或圆的面积 |
| 两条线相交吗? | 判断线段、角度关系 |
| 角度是多少? | 直角、钝角等的测量 |
| 一个形状可以变换成另一个吗? | 图形旋转、平移、对称等 |
那什么是“平面几何”?(Plane Geometry)#
平面几何是几何学中的一个分支,它只研究发生在二维平面上的形状和关系。
特征:
- 所有图形都在一张平面纸上(二维);
- 不考虑“厚度”或“高度”;
- 使用的对象包括:点、线段、直线、角、三角形、圆、多边形等;
如果读者还记得的话,这些都是中学几何课的主要内容。我们再举几个“平面几何”研究的问题:
- 点 A 到点 B 有多远?
- 一个三角形的三个角加起来等于多少度?(答案是 180°)
- 两条直线在什么情况下相交或平行?
- 一个圆的面积是多少?
- 如何通过两点确定一条直线?
欧几里得在《几何原本》中主要研究的,就是这种平面几何,也叫作欧几里得几何。
| 概念 | 解释 | 举例 |
|---|---|---|
| 几何(Geometry) | 研究形状、空间、位置、距离的数学学科 | 建房子、导航、画地图 |
| 平面几何(Plane Geometry) | 研究“二维空间”中点、线、面之间关系 | 三角形、圆、直角、距离公式等 |
| 欧几里得距离 | 平面几何中最基本的概念之一:两点之间的最短距离 |
平面几何就像是在一张白纸上讨论“点和线”的世界,而欧几里得距离,就是这个世界中最基础、最简单、却也最重要的一个度量单位。
欧几里得距离公式的几何含义#
我们从二维空间开始:
设有两个点:
它们之间的距离就是:
这正是初中数学中的勾股定理(Pythagorean theorem),意思是:两点之间的最短路径 = 连线形成的直角三角形的斜边。
你可能会问,为什么 代表“最短路径”?
想象一个简单的二维坐标系,我们还是有同样的两个点:
-
当我们写
x = (x₁, x₂)时,它表示的是一个点在二维平面坐标系中的位置,而不是“两个 x 值”或“都在 x 轴上的数”。这个写法来自数学中的“向量”或“点坐标”表示法。 -
在这个表示中,
x₁是点的横坐标(也就是 x 轴方向的位置),x₂是纵坐标(也就是 y 轴方向的位置)。比如:点x = (3, 4)表示“从原点向右走 3 格,再向上走 4 格”。 -
初学者很容易误解为
x₁和x₂都是 x 的数值,好像它们都在 x 轴上。其实不是这样,它们分别表示在两个维度上的坐标,就像“横着多少”和“竖着多少”。 -
总结一句话:
(x₁, x₂)是一个点的完整“地址”,第一维是横向(x轴),第二维是纵向(y轴)。这个格式也适用于三维空间,比如(x, y, z)表示 3D 空间中的一个点。 -
我们之所以在这里写
(x₁, x₂),是因为它表示x的第一个值为x₁,x的第一个值为x₂。
再回到我们的这两个点的例子中,你可以在纸上画出这两个点,然后连接它们,形成一条线段。
具体而言,如果你从 沿着横轴(x 轴)水平走到 的“垂直位置”,再垂直向上走到 ,你就画出了一个直角三角形:
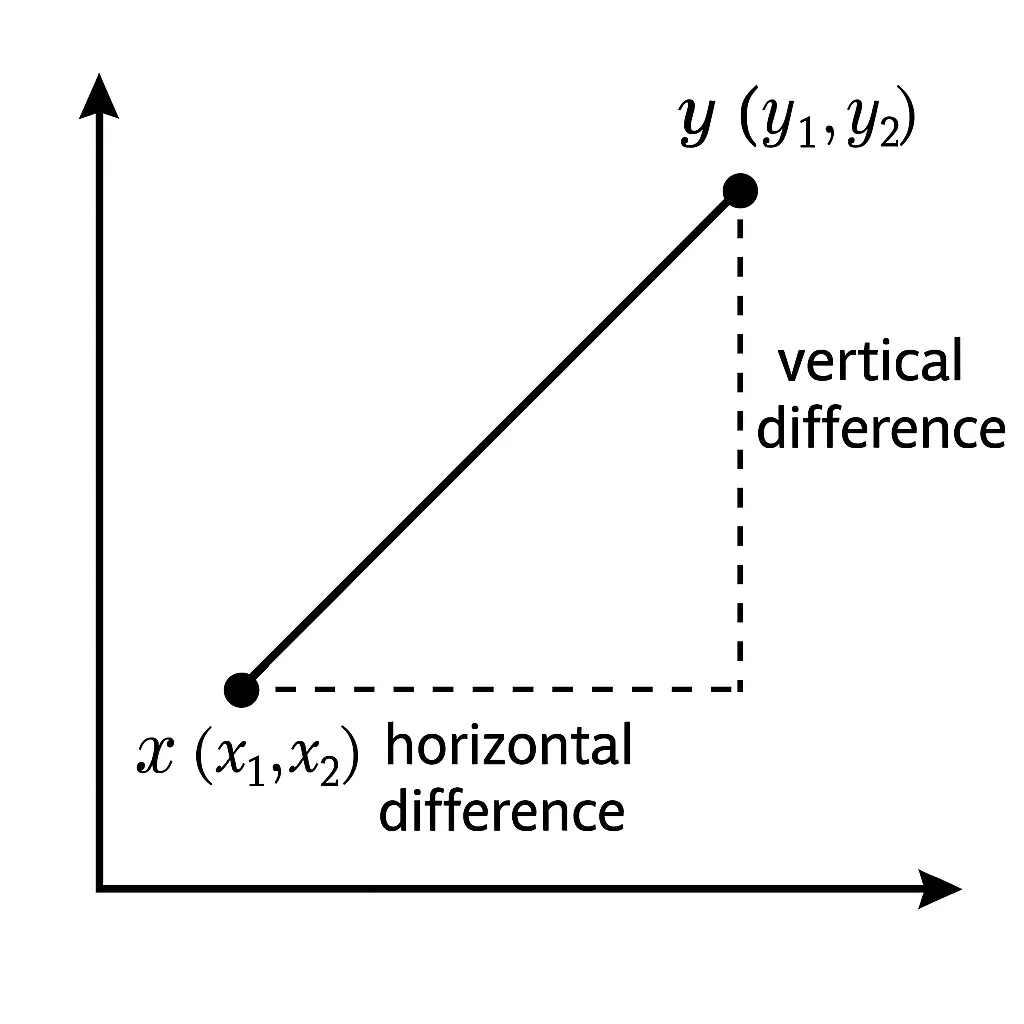
这个三角形的两条直角边就是:
- 横向差(Horizontal difference): (水平边长)
- 纵向差(Vertical difference): (垂直边长)
所以,这两个点之间的线段(即“最短路径”)就是这两个边组成的直角三角形的斜边,根据勾股定理:斜边² = 邻边² + 对边²
也就是:
取平方根就得到了两点之间的距离公式:
延伸到 n 维空间:
这就变成了我们在数据分析中最常用的距离度量方式。
二、从坐标到欧几里得空间#
这个公式其实是欧几里得几何空间中定义距离的标准方式。你可能会问:“为什么非得搞一个‘欧几里得空间’的概念?直接说平面、三角形不就行了吗?”
这是很多人在学习数学、线性代数、空间距离时会有的疑问。简而言之:
- “欧几里得空间”听起来有点吓人,其实就是我们日常所理解的“直角坐标系空间”,它的本质特征是可以使用勾股定理来计算距离。
- 在这个空间里,我们可以用向量的方式来表示点,点与点之间的“最短路径”就是向量差的模,也就是我们熟悉的“斜边长度”。
- 引入“欧几里得空间”这个词,是为了在数学上统一处理不同维度、不同坐标系统下的距离问题,方便推广、泛化和理论建模。
那么,具体该如何理解呢?
首先,其实我们已经在用“欧几里得空间”了。 当我们在二维平面上说:
两点之间的距离 =
这个就是欧几里得空间里的距离定义。只不过我们平时不说“欧几里得”,就直接当作生活常识用了。
那“欧几里得空间”这个词是啥意思? 欧几里得空间(Euclidean space)只是一个数学语言中对“我们习惯的空间”的正式称呼。
它满足下面这些特性:
| 特性 | 意义 |
|---|---|
| 有坐标轴 | 像 一样的直角坐标轴 |
| 有方向与距离 | 点与点之间可以测量“多远” |
| 满足勾股定理 | 形成三角形时,斜边² = 两直角边² |
| 向量加法、数乘有意义 | 、 这些操作能正确解释空间位置 |
所以,“欧几里得空间” = 有坐标、有方向、有勾股定理可用的那种熟悉的几何空间
比如:
- 你画图的那张图,是二维欧几里得空间
- 如果你是 3D 游戏建模,那就是三维欧几里得空间
- 如果你有 10 个维度的状态,那就是 ,也是欧几里得空间
注意: 是数学中表示“实数集”的标准符号,它采用了一种叫做黑板粗体(blackboard bold)的字体风格,用来强调这个符号代表的是一个特殊集合,而不是普通变量。
实数集包含了所有我们熟悉的连续数,比如:
... -3, -2.5, 0, 1.414, π, e, 1000.002 ...这种黑板粗体(blackboard bold)起源于美国大学讲课的时代,教授们在黑板上写字时,为了区分一些“特别重要的集合符号”,会故意加两笔竖线,表示:
-
:Real numbers(实数)
-
:Natural numbers(自然数)
-
:Integers(整数,来自德语 “Zahlen”)
-
:Rational numbers(有理数,来自 “Quotient”)
-
:Complex numbers(复数)
我们为什么要引入“欧几里得空间”这个概念?而不是只说“二维平面”?#
这是为了推广和统一数学语言。
我们可以这样理解:
| 我们口语说的 | 数学里的版本 |
|---|---|
| 画在纸上的平面 | 欧几里得空间 |
| 空间中两个点的距离 | 向量之差的欧几里得范数 |
| 勾股定理 | 范数公式 |
| 两个点之间的最短路径 | 欧几里得距离(Euclidean distance) |
也就是说,欧几里得空间是数学用来“抽象地描述所有这类空间”的统一概念,不管你是二维的、三维的,甚至是 100 维的,它都能用统一方式处理。
打个通俗比方,想象你写代码时,经常要对人、动物、车辆做处理,如果你把它们都抽象成一个“对象”,那你就可以写:
for obj in all_objects: obj.move()而不是:
for person in people: person.move()for animal in animals: animal.move()欧几里得空间的作用就是这种“数学抽象统一”:你不管分析 2D 空间、3D 空间、10D 向量空间,用的都是同一个范数、一个公式、一个几何思想。
那么,结合我们这个小节和上个小节所说的,不妨来再来理解一下,这个3D欧几里得空间即 是什么意思?
并不是“3个实数”或者“实数的三次方”,而是三维欧几里得空间(3-dimensional Euclidean space),用数学语言表达就是:所有三维实数向量组成的集合。
它的意思是:
所有可以写成 的三维坐标点,
其中 (都是实数)
具体拆解一下 的含义:
-
表示实数集合
比如 、、 都属于 -
表示的是长度为 的实数向量空间
也就是 维坐标系统中的所有可能的点(每个点有 个坐标值)
我们再做一个对比:
| 表达式 | 含义说明 | 对应空间 |
|---|---|---|
| 所有实数点,数轴上的一条线 | 一维直线 | |
| 所有 实数点,组成平面 | 二维平面(如地图、画布) | |
| 所有 实数点,组成三维空间 | 三维空间(如 3D 模型、地球) | |
| 所有含 10 个实数的向量 | 十维空间(常用于机器学习) |
那为什么我们说 是一个“欧几里得空间”?
因为在这个空间里:
- 有坐标轴()
- 点与点之间的距离可以用欧几里得距离公式来算:
- 满足我们熟悉的几何规则(如勾股定理、平移不变、直线最短等)
这就构成了一个三维欧几里得空间 :“用实数来表达坐标,用直线来连接点,用勾股定理来计算距离的三维空间”。
小结:
- 在我们这里说的 ,意思是“三维欧几里得空间”,
- 它包含了所有像 这样的实数向量,是一个坐标可定义、距离可计算、符合直觉几何规则的空间。
- 这种表达方式也适用于更高维,比如社会状态向量在 中比较差异。
欧几里得空间 vs 非欧空间#
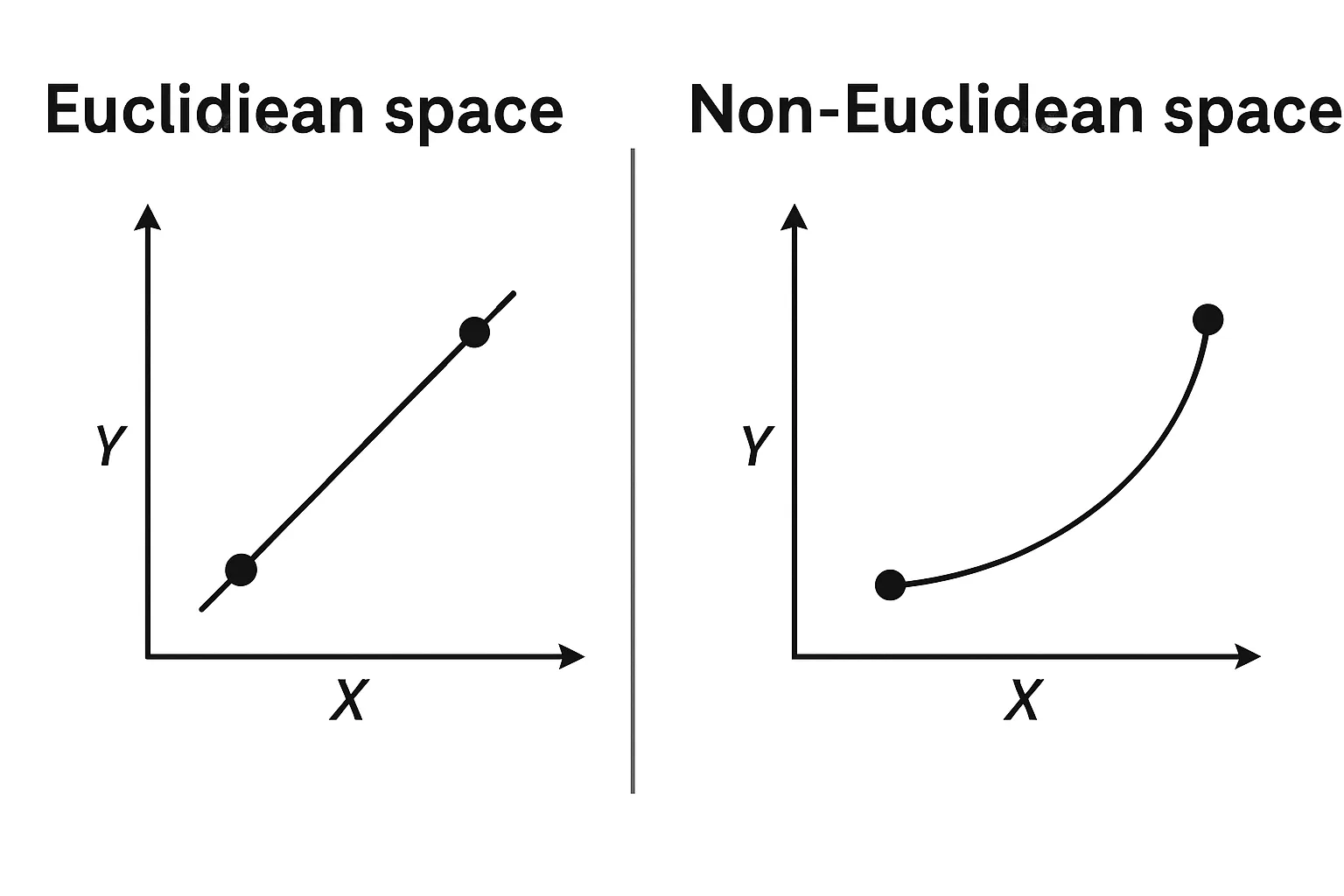
在上图中,我们直观地对比了两种截然不同的空间结构:
左侧:二维欧几里得空间(Euclidean Space)
你可以看到一个标准的、网格状的平面,坐标轴是互相垂直的直线,这就是我们最熟悉的空间形式,也就是高中数学里“直角坐标系”的抽象化表达。
在这个空间中:
- 点之间的最短路径是直线;
- 可以使用勾股定理来计算距离;
- 空间是“平的”、没有弯曲;
- 方向、角度和长度都有稳定的几何意义。
这种空间结构适用于我们平时的纸面几何、二维地图分析、数据空间可视化等常见情境。我们所说的“欧几里得距离”就是在这种空间中定义的。
右侧:非欧空间(Non-Euclidean Space)
右边则展示了一个弯曲的曲面空间,它可以是一种球面、鞍面或一般的曲率空间(图中简化成波浪形平面)。这类空间就属于非欧几何的范畴。
在这样的空间中:
- 点与点之间的最短路径(叫“测地线”)不再是直线,而是随曲率弯曲的弧线;
- 勾股定理不成立;
- 空间的结构受“弯曲程度”影响,方向感和角度定义可能会改变;
- 比如:在地球表面两点之间的最短路径是一段“大圆弧”而不是地图上的直线。
我们平时“假设”生活在欧几里得空间,是因为这在小尺度上非常接近现实、计算简单、直观易懂,相当于是一个简化的模型。
但严格来说,真实世界其实是非欧几里得的,尤其在大尺度、高速度、复杂结构中,这种假设会迅速失效。
那为什么我们可以平时“假设”生活在欧几里得空间呢?因为在日常生活的尺度范围内(比如城市、房间、小尺度地图),地球的曲率几乎感觉不到,重力场变化也很小,光速的限制也不会影响你走路、开车、购物。
所以我们才会自然地觉得:“两点之间的最短路径是直线”,“平行线永不相交”,“勾股定理一定成立”;而这些,都是欧几里得几何的核心公理。
正是因为这些假设在我们的经验中“没有出错”,于是我们把它当作理所当然的空间认知框架。
但是,在以下领域中,非欧几何就变得不可或缺:
| 应用领域 | 非欧空间的意义 |
|---|---|
| 地理学 / 导航 | 地球是球面,必须使用球面几何计算距离 |
| 广义相对论 | 引力使空间弯曲,不能再假设空间是“平的” |
| 高维数据分析 | 某些复杂数据空间具有内在弯曲结构 |
| 某些社会科学 | 网络结构、时间路径、状态空间非线性变形 |
小结一句话:
欧几里得空间是“平的”,适合描述我们熟悉的直线距离;
非欧空间是“弯的”,适合描述现实中复杂、弯曲的结构世界。
为什么欧几里得距离能流行几千年?
| 原因 | 具体解释 |
|---|---|
| 几何直觉强 | “最近的两点之间就是一条直线”,人人都能理解 |
| 数学性质好 | 连续、可导、满足三角不等式,是“度量空间”的基石 |
| 应用范围广 | 数据分析、图像处理、聚类算法、空间建模无所不在 |
| 高维可拓展 | 它不只适用于二维、三维空间,而是任意维度的“空间距离”概念 |
| 算法友好 | 很多算法如 PCA、t-SNE、KNN 都默认使用它作为基础距离计算方式 |
欧几里得距离不仅是最古老的距离度量方式之一,也是现代数据科学的核心工具之一。
它将“几何直觉”与“代数表达”结合,成就了一个横跨两千年数学史的超级公式,从欧几里得到笛卡尔,到高维向量空间,再到机器学习和社会科学序列分析,一个公式贯通古今。
三、有这么多距离范数,为什么我们要选欧几里得范数(L2)?#
在研究“两个序列有多相似”这个问题时,我们经常会把每个序列转换成一个向量,然后再去计算向量之间的“距离”。
比如,一个人生轨迹可以变成这样一个向量(如果你已经看了我们上一篇教程的话):
工作:40%,失业:30%,照顾家庭:30% → 向量:[0.4, 0.3, 0.3]那么问题来了:你怎么衡量两个这样的向量有多不一样?这就引出了一个数学核心概念——范数(norm)。
什么是范数?#
简单来说,范数(norm)就是衡量“一个向量有多大”或“两个向量相差有多远”的方法。它是数学中最常用的一种度量工具。
常见的范数属于 范数家族,其一般形式为:
这条公式表示:
把两个向量之间的每一维的差值取 次方,加起来,再开 次方。
不同的 值,就代表了不同的“距离感”。
我们一步步来拆解这个公式:
| 公式部分 | 含义 |
|---|---|
是两个 n 维向量(比如 [3, 4] 和 [0, 0]) | |
| 表示第 个维度的差值 | |
| 把差值的绝对值做 次方,保证都是正数 | |
| 把所有维度的差值累加起来 | |
| 最后开 次方,完成“标准化”处理 |
本质上:这是在问 “x 和 y 有多不一样”,但用不同方式度量这个“不一样”。
我们可以看出来,其实说到底,范数衡量的还是两个点之间的距离,只不过是不同的范数(不同定义的规则)下,对距离有着不同的理解。
就像现实中从家到超市有不同的走法(比如走斜线 vs 沿街拐弯),不同的范数,就是不同的“走法规则”。
举个具体例子,我们来计算同一对向量在不同 值下的距离。
设有两个二维向量:
我们来看:
L1 范数(曼哈顿距离)#
像是在城市街区里走的路线:走横的3格 + 走竖的4格 = 总共走了7个格子
这也是为什么我们叫它曼哈顿距离的原因,因为在纽约有个叫做曼哈顿的街区,这个街区地理规划都是像棋盘一样,街区都是一格一格的。因此,在这样的街区中行走,你只能横着竖着走,没办法斜着走(L2 欧几里得距离)。
L2 范数(欧几里得距离)#
这是我们熟悉的直线距离,基于勾股定理,可以发现从 x 走到 y,直线的最短距离是 5。
L∞ 范数(最大距离)#
只关注哪个维度差得最远,也叫“切比雪夫距离”。
那“4”代表什么?
根据 x 和 y 的坐标,两个维度的差是:
- 第一维(横向走):
- 第二维(纵向走):
所以,根据公式
这意味着,在两个点之间,最“难跨越”的一个维度的差值是 4。
切比雪夫距离在国际象棋中也很常见:
- 棋盘上的“国王”,每一步最多只能往一个方向移动一格(可以对角、也可以直走);
- 从 到 ,最少也要走 4 步,因为你一次只能“对角靠近一步”
你可能会问,为什么不是“总长度”或者“斜线”?
- 因为那是其他范数的思路:
- L2 范数(欧几里得距离)是斜边思维,计算从 到 的真实最短直线距离;
- L1 范数(曼哈顿距离)是总成本思维,表示你在所有维度上“加起来”走了多少;
- L∞ 范数是最坏情况思维,意思是:不管其他维度多好,我只看最难的一维要走多远,因为任务的瓶颈决定一切。
使用场景
- 机器控制系统:哪个轴运动得最慢,决定了任务完成的总时间
- 比如,一个多轴控制的机器臂要在 和 两个方向同时移动, 轴要走 3 单位, 轴要走 4 单位,但两个轴的马达不能协同加速,只能匀速运动,而任务只有在最慢的轴也完成动作时才算结束。
- 这时候,总时间 = max(3, 4) = 4 秒。也就是说:最慢的那一维,拖慢了整体任务的完成时间。
- 网格游戏路径规划
- 容差分析:检测哪个维度的误差最大
- 棋盘类策略建模(国际象棋、围棋AI等)
小结一下,对比不同范数的感知方式:
| 范数 | 例子值 | 直觉意义 |
|---|---|---|
| L1 | 7 | 所有方向加起来有多远(街区距离) |
| L2 | 5 | 实际直线距离(最短路径) |
| L∞ | 4 | 最大一维的差距(最坏情况) |
也就是说: 范数就是要我们问自己,我们到底想如何感受差异?是全部加起来?只看最远的那个维度?还是权衡整体形状?
比如我们从家走到超市,有不同的走法:
- 如果你想从家到超市走得最近,选 L2;
- 如果你只能直走或转弯,像在棋盘上走路,选 L1;
- 如果你只关心最难走的一步,选 L∞。
现在我们知道了有各种各样的范数,但是为什么欧几里得距离(L2)最常用呢?#
欧几里得范数,就是 范数,它的计算公式是:
也就是我们在二维空间里熟悉的“直线距离”或“斜边长度”。
它的优势主要体现在以下几个方面:
| 优势类别 | 原因解释 |
|---|---|
| 几何意义直观 | 它对应的是我们直觉上的“最短路径”,也就是两个点之间的直线,符合勾股定理 |
| 方向感更稳定 | 比 L1 更能体现“整体差异方向”,不会被维度的正负号抵消 |
| 计算优化友好 | 是连续可导函数,在机器学习/优化中非常好用 |
| 算法兼容性好 | 是很多算法默认距离度量,如 K-Means、SVM、PCA 等 |
| 不偏不倚 | 不像 L1 强调稀疏,也不像 L∞ 只关注极端值,L2 在整体结构上更“平均” |
| 可以定义内积空间 | 也就是说它不仅能算距离,还能定义“角度”、“正交”、“投影”等概念 |
L2 范数(欧几里得距离)几乎出现在所有与“距离”、“误差”、“最优解”有关的算法或建模思路中。
1. 误差衡量:L2 损失函数(最小二乘)#
应用场景:
- 线性回归
- 神经网络中的 MSE(均方误差)
- 时间序列预测
- 信号还原
举例: 在线性回归中,我们用 L2 损失来度量真实值 和预测值 的差异:
优点:
- 可导,适合反向传播;
- 惩罚大误差 → 模型更关注预测不准的地方;
- 数学分析性强,解可以解析求得。
2. 聚类分析:K-means 算法#
应用场景:
- 客户细分
- 图像压缩
- 文本主题聚类(向量空间)
- 生物数据聚类(如基因表达)
为什么用 L2?
-
K-means 的核心是最小化样本点到聚类中心的欧几里得平方距离:
-
欧几里得距离与“向量空间中的均值”匹配良好,能快速迭代并找到最优聚类。
3. 降维分析:主成分分析(PCA)#
应用场景:
- 数据可视化
- 特征压缩
- 去噪处理
和 L2 的关系: PCA 的目标是找出保留最大方差(也就是最小 L2 重构误差)的投影方向:
-
在欧几里得空间中找出最佳投影,使得:
4. 最近邻算法(KNN)中的距离计算#
应用场景:
- 分类预测(KNN)
- 推荐系统(基于相似度)
- 异常检测
为什么常用 L2?
- L2 作为“物理空间中的直线距离”最直观;
- 特别适合数值型向量(如图像像素、用户打分等);
- 计算效率高,可加速(如使用 KD-Tree)。
5. 图像处理与计算机视觉#
应用场景:
- 图像相似度度量
- 图像去噪(Total Variation Regularization 中常搭配 L2)
- 特征匹配(如 SIFT 特征之间的 L2 距离)
举例:
- 比较两张人脸特征向量之间的距离;
- 使用 L2 匹配图像块进行修复;
- 神经网络中用 L2 loss 训练去噪自编码器。
6. 正则化项:Ridge Regression(L2 正则)#
应用场景:
- 防止模型过拟合
- 回归参数收缩
- 稳定性增强(尤其是共线性场景)
正则项:
- 惩罚参数幅度,使模型“更保守”;
- 结果是系数更平滑,但不会变成 0。
L2 范数在哪些问题中最适用?
| 应用方向 | 使用方式 | 为什么用 L2? |
|---|---|---|
| 回归模型 | L2 损失 | 关注大误差,导数光滑 |
| 聚类分析 | 距离计算 | 快速可导,适合均值 |
| 降维压缩 | 重构误差 | 提供最小整体偏差方向 |
| 图像处理 | 特征距离 | 视觉向量空间中最自然 |
| 模型正则化 | 参数缩小 | 保留全部特征,控制复杂度 |
一句话总结:L2 范数适用于你关心整体误差、喜欢“光滑变化”、强调最短路径、或模型要可导、好优化的场景。
加餐:什么是“向量”?什么是“分量”?#
我们在坐标图中经常会看到像 这样的表达,很多人一开始可能会有点迷糊:为什么这个“x”后面有两个数?它们到底是什么?
其实,这种写法表示的并不是“两个 x 值”,而是一个二维空间里的向量(vector)。
向量是“有方向的量”#
你可以把“向量”想象成一支箭头,它有两个基本特征:
- 大小(magnitude):箭头有多长
- 方向(direction):箭头指向哪里
在二维空间里,一个向量通常表示“从某个起点出发,走多少横向 + 多少纵向”。
比如:
- 向量 表示:从起点向右走 3 格,再向上走 4 格
这个箭头就从原点 指向 ,它的终点就是我们常说的“点的位置”。
分量是什么意思?#
向量有多个“方向上的分量”(components),也就是它在每个坐标轴上“贡献了多少”。
在二维空间里:
- 第一个分量 :表示在 x 轴方向(横向)移动的距离
- 第二个分量 :表示在 y 轴方向(纵向)移动的距离
所以我们说:一个向量是由多个“分量”组成的,每个分量告诉我们它在某一个方向上的“分布”或“投影”。
比如,向量 就是一个有两个分量的向量:3 是它的横向分量,4 是它的纵向分量。
为什么这很重要?#
在计算两点之间的距离时,我们其实就是在比较两个向量之间的差距(也就是从一个箭头指向另一个箭头的最短线段长度)。这时我们必须知道它们各自在 x 轴和 y 轴上“分别走了多少” —— 也就是比较它们的“分量差”。
小结
- 向量是一种“有大小和方向的量”,它就像一个箭头
- 分量是这个箭头在每个坐标方向上的投影
- 所以 表示的是“横向 ,纵向 ”的一个向量,它也可以代表一个点在平面上的位置,因为它们在本质上是一样的